Пневмозахваты
Пневмозахват — это пневматический исполнительный механизм, предназначенный для автоматического захвата, удержания и перемещения объектов. Он работает за счет подачи сжатого воздуха, который приводит в движение его механические пальцы (губки, губцевые элементы). Пневмозахваты широко применяются в автоматизированных производственных линиях, робототехнике, сборочных манипуляторах и логистических системах.
ОДО КРИОЛА поставляет полный спектр пневматических компонентов производства EMC, а так же других производителей в том числе Festo и SMC
Типы пневмозахватов:
1️⃣ Двухпальцевые (параллельные) – наиболее распространенный тип, обеспечивающий симметричное сжатие объекта.
2️⃣ Двухпальцевые (радиальные) – пальцы расходятся по дуге, подходят для удержания круглых объектов.
3️⃣ Трехпальцевые – позволяют более надежно фиксировать цилиндрические и сложные детали.
🔹 По способу действия:
1️⃣ Одностороннего действия – работает только в одном направлении, возврат происходит с помощью пружины.
2️⃣ Двустороннего действия – движение в обе стороны регулируется подачей сжатого воздуха.
🔹 По способу крепления:
1️⃣ Внешний захват – пневмозахват удерживает объект снаружи.
2️⃣ Внутренний захват – пальцы раздвигаются, фиксируя объект изнутри.
Основные характеристики:
✔ Материалы: алюминий, сталь, пластик.
✔ Скорость срабатывания: высокая, подходит для динамических процессов.
✔ Способы управления: пневмоклапаны, датчики, программируемые контроллеры.
✔ Датчики положения: магнитные или механические для контроля работы.
Преимущества пневмозахватов:
✅ Надежность и долговечность – минимум подвижных частей, низкий износ.
✅ Простота конструкции – легкость в обслуживании и ремонте.
✅ Возможность работы в жестких условиях – высокая устойчивость к загрязнениям, пыли и влажности.
Применение:
📦 Логистика и складские комплексы – манипуляция коробками и товарами.
🚗 Автомобильная промышленность – обработка и сборка компонентов.
🔬 Электроника – работа с миниатюрными элементами.
🥫 Пищевая промышленность – автоматизированная фасовка продукции.
-

SHY
радиальный пневмозахватдиаметр: 10 16 20 25
-
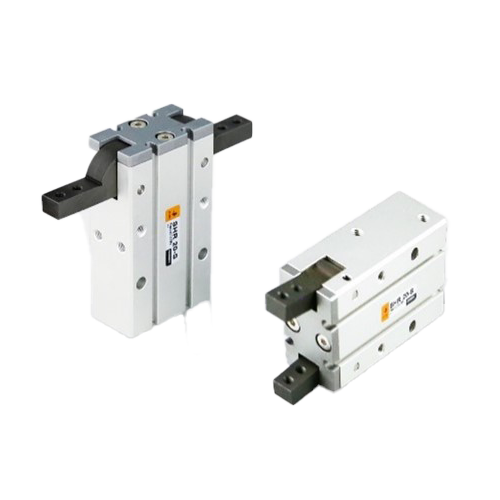
SHR
радиальный пневмозахват
диаметр: 10 16 20 25
Усилие N.m: 0.16 ... 2.30 -
MHWдиаметр: 10 16 20 32
-
SHZ
параллельный пневмозахват
диаметр: 10 16 20 25 32 40
-
SHLпараллельный пневмозахват
диаметр: 16 20 25 32
-
SHFпараллельный пневмозахват
диаметр: 8 12 16 20
-
MHFпараллельный пневмозахват
диаметр: 8 12 16 20
-
MHLпараллельный пневмозахват
диаметр: 10 16 20 25 32 40
-
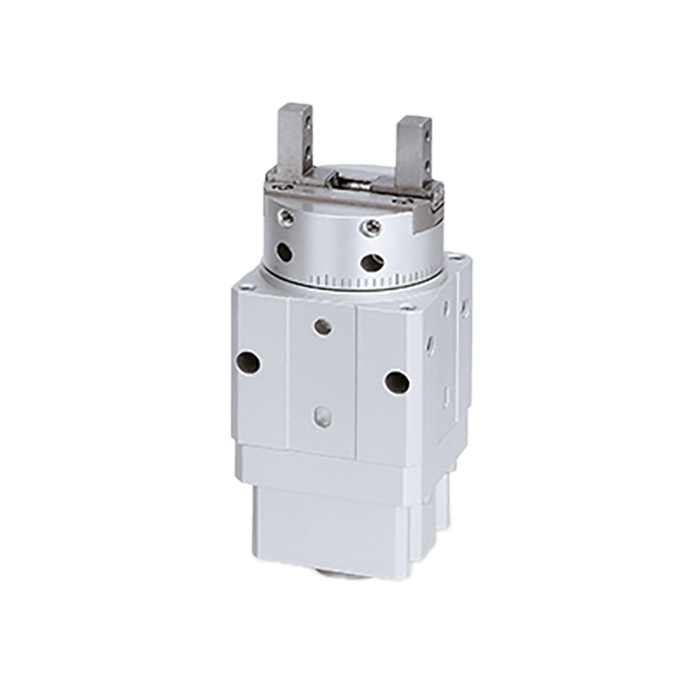
MRHQпневмозахват с поворотным модулем
диаметр: 10 16 20 25
-
MHS2двухкулачковый захват
диаметр: 16 20 25
-
MHS3трехкулачковый захват
диаметр: 32 40 50 63 80 100 125
-
MHS4четырехкулачковый захват
диаметр: 16 20 25